version 0.0 27 Mars 2014
rev
PIC
18F26K22 et ADXL345 Accélérometre 3 axes
usage d'un PIC18F26K22 en DIP28 et du Pickit2 Microchip
pour charger l'executable
Environnemen t: MPLAB IDE V8.92 et C18
v3.45.00
Testé avec oscillateur interne
Fosc=16Mhz
ADXL345
datasheet
ADXL345 MiniInTheBox ref: S067802700001..à 5,51€ TTC
Axelerometre ADXL345
GENERAL DESCRIPTION
L' ADXL345 est de tres petites dimensions , consomme tres peu, 23µA mini..
et mesure l'acceleration sur 3 axes avec une tres haute resolution de mesure sur 13 bits avec une gamme de +-16g
La sortie des donnees est formatée sur 16 bits en complement à 2 et est accessible via un interface Bus SPI (3 ou 4 fils) ou Bus I2C 2 fils
L'alimentation du module va de 2,5V à 3,6V (maxi:)
L' ADXL345 est bien adapté pour les applications mobiles .Il mesure l'acceleration statique de la gravité dans les application de mesures de choc,
aussi bien que pour les application d'elements en mouvement : acceleration resultant d'un deplacement ou choc
Sa haute resolution de 3.9 mg /par bit permet de mesurer une inclinaison de < 1.0 degré
Des fonctions speciales sont inclues:
Detection de deplacement (ou arret) en comparant la mesure d'acceleration sur chacun des axes, avrc un seuil defini par l'utilisateur
Detection de chute libre
Ces fonctions peuvent etre aiguillees sur l'une des sorties d'interruption IN1 ou IN2.
Une pile FIFO de 32 niveau en memoire peut etre utilisee pour stocker les donnees ,
sans soliciter le processeur MCU et ainsi diminuer la consommation globale
Gammes de resolution se mesure: +-2g ur 10 bit , +-4g ur 11 bit, +-8 gur 12 bit,+-16 g sur 13bits
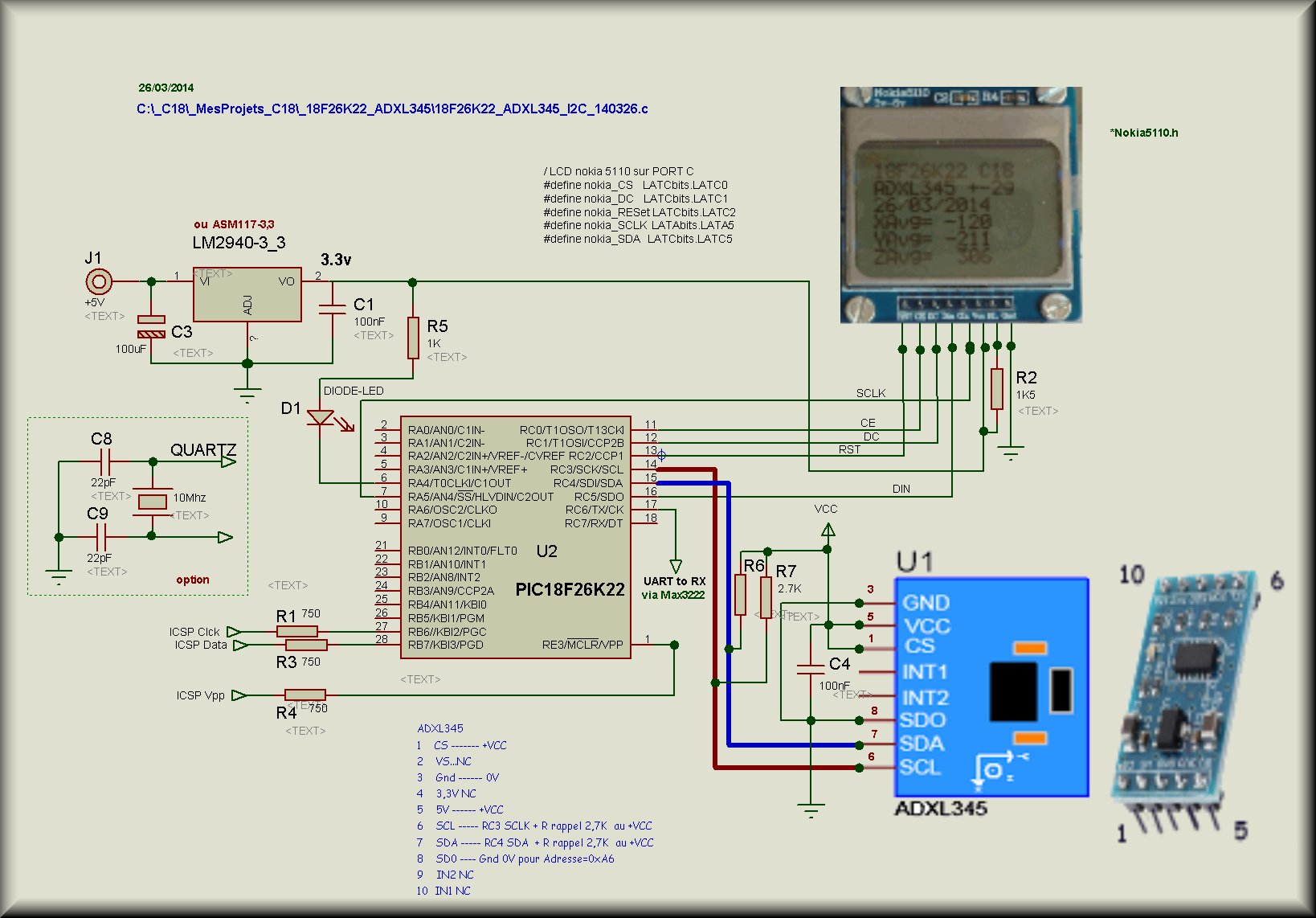
Synoptique Prototype Schema Schema ISIS: 18F26K22_ADXL345_3-6V.DSN *pas de simulation !
Liaisons PIC <-> ADXL345
Usage de l'I2C
I2C device adresse avec SDO=0V ----> 0xA6 (Write) 0xA7 (Read)
Le breakboar se presente sous un format de 2x5 pins
ADXL345
1 CS ------- +VCC
2 VS...NC
3 Gnd ------ 0V
4 3,3V NC
5 5V ------ +VCC
6 SCL ----- RC3 SCLK + R rappel 2,7K au +VCC
7 SDA ----- RC4 SDA + R rappel 2,7K au +VCC
8 SD0 ---- Gnd 0V pour Adresse=0xA6
9 IN2 NC
10 IN1 NC
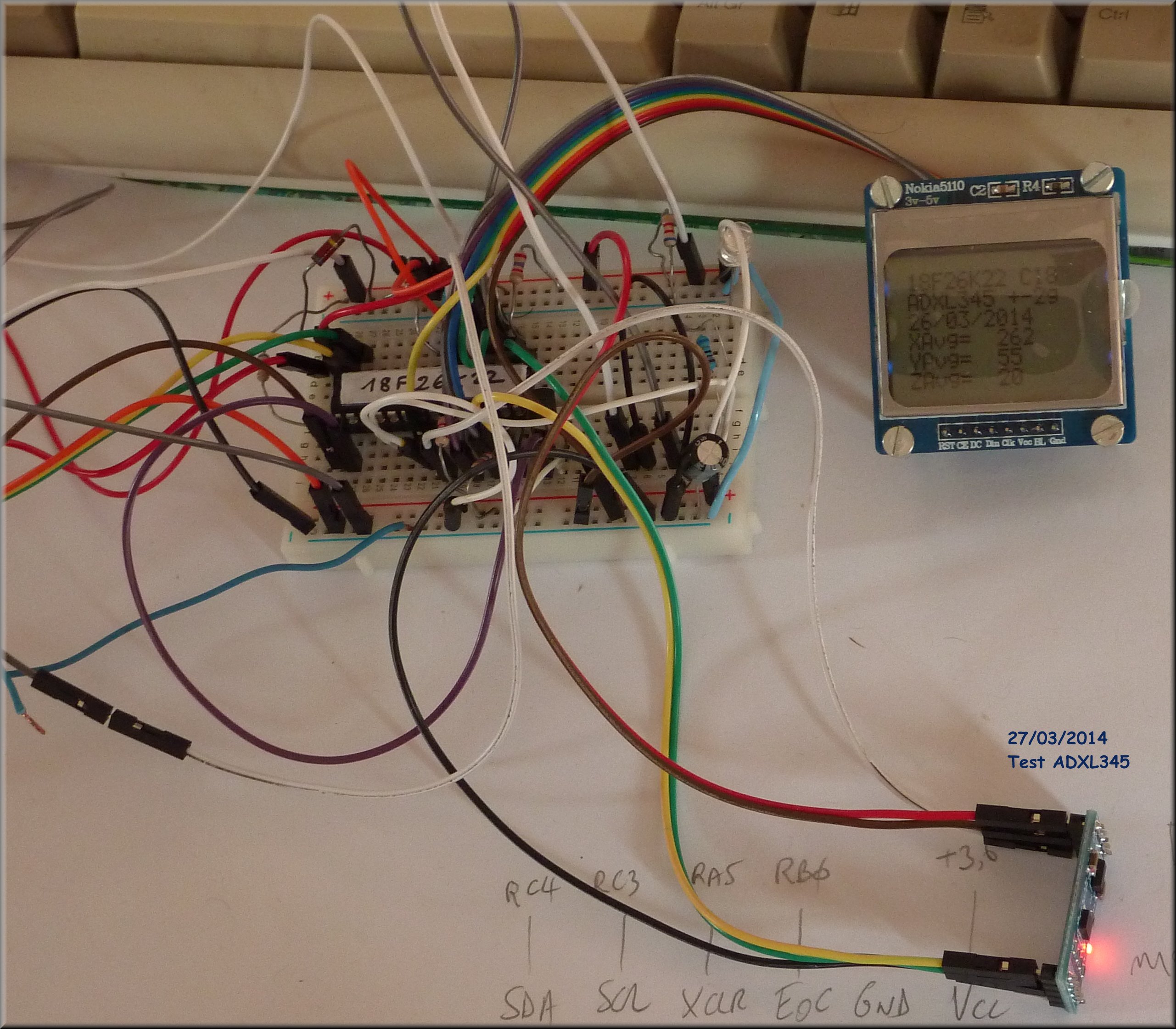
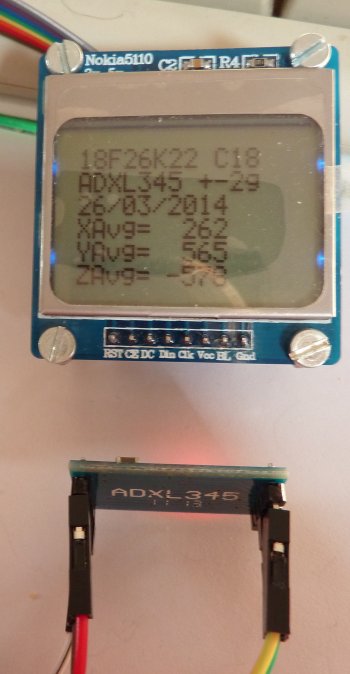
Les infos sont envoyées sur l' UART et sur le LCD nokia
En mettant l'entree RA7 à 0 (zero) on liste le detail des 16 meures individuelles X,Y,Z
Le nokia affiche la moyenne des 16 dernieres mesures des 3 axes X,Y,Z , rafraichissement à chaque seconde.RC6 utilisé comme sortie Tx UART 19200,8,N,1-> module MAX3222 (alimenté en 3,3V!!)-> PC
Result sur terminal RS232 :
Mesure 1 Mesure 2 Mesure 3 Mesure 4 Mesures suivant differentes positions du capteur ADXL345
Projet complet en MPLAB IDE V8.92 et C18 v 3.45
Liste des fichiers _18F26K22_ADXL345.htm
Zip du projet : _18F26K22_ADXL345.zip